【無人機知識】IMU 是什麼?決定無人機飛行穩不穩的「隱形大腦」

Last Updated on 2026-04-30 by James Huang
相信有在使用無人機的你,不論是在一般空拍或是在工業巡檢的過程中,你可能都有讚嘆過無人機在強風狀態飛行時,姿態依然如同被「固定」在空中般的穩定。這其實是無人機被精心設計出來的一種「人工平衡感」。
而這份平衡感的核心,藏在一個你幾乎看不見的地方 :
一個只有幾毫米大小的小模組,
一個每秒進行數千次運算、不斷感知自身狀態的系統。
IMU(Inertial Measurement Unit,慣性測量單元)。
如果把無人機看作一個生命體:馬達是肌肉、電池是心臟、飛控是大腦,那麼 IMU,就是它的「內耳」與「神經回饋系統」。沒有它,飛行不只是困難,而是根本無法成立。
接下來,我們就從這個微小卻關鍵的核心開始,重新理解無人機究竟是如何在混亂與不確定中,維持那份看似理所當然的優雅。
一、到底什麼是 IMU(慣性測量單元):無人機飛控的核心感測器
在多數入門理解裡,IMU(慣性測量單元)常被簡化為「用來判斷是否傾斜的零件」。但如果把視角拉到工程與實務操作層級,它其實更接近無人機的前庭系統,一個負責讓飛行器理解「自己正在如何存在於空間中」的核心感知模組。
簡單來說,IMU(慣性測量單元)的功能就是在持續解決無人機在飛行中的關鍵問題:「此刻的我,正在如何移動?」
通常來說,一個標準 的 IMU 會由以下三種感測能力組成:
- 陀螺儀(Gyroscope): 負責感知角速度,也就是無人機翻轉、偏航、傾斜的變化速率。它決定飛控系統能不能「即時知道姿態正在改變」。
- 加速度計(Accelerometer): 感知線性加速度與重力方向,是飛行穩定判斷的基礎參考。簡單來說,它讓系統知道「哪裡是下方」,以及外力正在如何影響機體。
- 磁力計(Magnetometer): 提供地磁方向作為長時間航向修正的依據,避免單靠短時間慣性計算造成的航向漂移。
現在的高階工業級無人機,往往不再只依賴單一 IMU。為了確保商業作業的安全性,設備通常會搭載「多重冗餘系統」(Redundant IMU)。當主感測器受到高頻振動干擾或數據異常時,系統能在毫秒間切換至備用系統。這種**「硬體冗餘 + 軟體容錯」**的架構,正是消費級產品與工業級設備的分水嶺。
-1-1024x559.png)
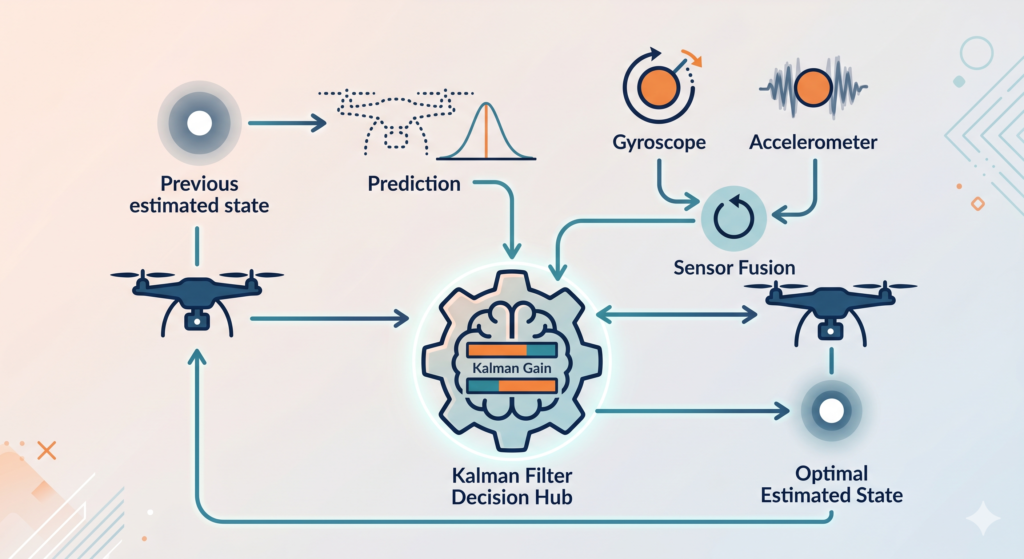
二、IMU 的靈魂 : 卡爾曼濾波演算法(Kalman Filter)
如果說 IMU 是無人機的神經末梢,那麼卡爾曼濾波(Kalman Filter)就是位於更高層的「決策中樞」,它負責處理一個極其根本但也極其現實的問題:所有感測器提供的數據都不完全可信,但系統仍然必須從中推導出接近真實的狀態。
這種不可靠性來自於不同感測器的先天「不完美」限制:
- 加速度 : 計對振動極度敏感,會在電機高頻震動與氣流擾動下產生大量雜訊,使瞬時數據劇烈波動
- 陀螺儀 : 雖然短期穩定,卻會隨時間累積誤差,形成所謂的 drift,像一個看似可靠但方向逐漸偏移的指南針。
卡爾曼濾波的核心價值,正是在這兩種「各自失真」的資訊之間建立一套動態信任機制,它並不是單純的平均,而是一種持續更新的最優估計流程:首先透過前一時刻的狀態與運動模型進行「預測」,推算出當前無人機應有的位置、速度與姿態;接著再將這個預測值與實際感測器回傳的觀測值進行比對,計算兩者之間的偏差;最後透過所謂的「卡爾曼增益」,動態調整對預測與觀測的權重分配——當環境震動劇烈、感測器噪聲升高時,系統會降低對即時數據的信任、提高對模型預測的依賴;反之當訊號穩定時,則更多相信感測器本身的輸出。
這種持續自我校正的過程,讓無人機即使在強風、震動與高速姿態變化的極端條件下,仍能穩定估算自身狀態,維持飛行控制的精準性。但真正成熟的系統設計不只停留在演算法層面,還會進一步延伸到硬體工程,例如透過阻尼減震球、懸浮式 IMU 結構或機身隔振設計,先行降低進入系統的原始噪聲,讓卡爾曼濾波「不必處理太髒的資料」。因此,最終的穩定性並不是單一技術的結果,而是硬體減噪與軟體估算之間的協同進化,本質上是一套從物理世界到數學模型再回到控制輸出的閉環工程。
三、後 GPS 時代的 IMU : VIO 視覺慣性里程計
隨著無人機應用場景從開放空域逐步延伸至室內巡檢、地下空間與隧道勘測等「GPS 完全不可用或嚴重退化」的環境,IMU 的角色正在從輔助定位元件,進化為整個導航系統的核心骨架。我們可以預見未來無人機的飛行能力,不再以依賴外部訊號為主軸,更重要的是取決於機體自身對運動狀態的「自主理解能力」。
在這樣的背景下,視覺慣性里程計(Visual-Inertial Odometry, VIO)會成為下一代導航架構的主流方向。它的核心思路是將相機的視覺資訊與 IMU 的高頻運動數據進行深度融合:相機負責提供環境特徵與相對位移的「空間參考」,而 IMU 則負責補足視覺系統在低光、模糊或快速運動時產生的斷裂資訊。
當視覺系統因光線不足、紋理缺失或遮蔽而失效時,IMU 以高頻率的姿態與加速度推算維持短時間內的運動連續性,確保飛行器不會在感知斷裂中失去穩定性。這種「視覺提供理解、慣性提供連續性」的架構,本質上是在建立一套可在無 GPS 環境中獨立運行的自主定位系統,也被視為無人機邁向真正自主飛行的關鍵技術門檻。
另一方面,IMU 技術本身也正面臨供應鏈與產業結構的重組。過去高精度 IMU 長期依賴國際供應商,在精度、穩定性與可靠性上形成技術門檻,但近年隨著 MEMS(微機電系統)技術成熟與製程進步,國產化替代正在加速推進,特別是在工業級與商用級應用領域,已逐漸出現具備成本優勢與性能競爭力的產品。這種轉變不只是零組件替換,更意味著整體系統設計邏輯的改變——當 IMU 成本下降、供應穩定性提升,無人機設計將從「高精密依賴少量高端感測器」轉向「多感測融合與冗餘設計」。
總結來說,未來如果你想開發一台可以同時在室外和封閉空間穩定飛行的無人機,開發規劃的重點選擇會是具備高抗衝擊能力、低功耗、穩定批次一致性的工業級 MEMS IMU,並將其納入 VIO、SLAM 等融合架構中,透過系統級設計來放大整體性能。為因應多元場景的需求,IMU 正從「高精度零件競賽」轉變為「系統整合能力競賽」,真正的差異會是來自整體導航架構的設計能力。

四、台灣隱形冠軍 : 本文相關供應鏈廠商參考
上游:晶片設計與模組開發
- 連騰科技 (Awan Sensing) : 台灣首家自主開發高精度 IMU/AHRS 模組。其產品核心在於「自研融合算法」,能將原始感測數據透過複雜的卡爾曼濾波轉化為精準飛行姿態,是達成無人機「國產化大腦」的核心。
- 大辰科技 (Locosys) : 專精於 GNSS 與 IMU 的融合導航技術。這實踐了文章提到的「多源傳感器融合」,確保無人機在失去衛星訊號時,仍能維持穩定的定位與導航
- 景傳光電 (Pixon) : 提供光纖陀螺儀 (FOG) 與 MEMS IMU。其高穩定性產品針對「低偏置不穩定性」進行優化,專為中大型或特種無人機的精確姿態控制而生。
中游:代工製造與先進封裝
- 亞太優勢 (APM) : 台灣領先的 MEMS 專業晶圓代工廠。技術核心在於將加速度計、陀螺儀等微型機械結構精確地「刻」在矽片上。亞太優勢早於 2010 年前便完成三軸 MEMS 加速度計的量產開發,是讓 IMU 從設計端走入量產的產業鏈技術支柱。
- 日月光 (ASE Group) : 提供系統級封裝 (SiP)。將微小的陀螺儀與加速規緊湊封裝,並確保封裝過程不產生應力干擾感測器,這正是維持 IMU 數據純淨度的關鍵。
五、本文總結
IMU 雖然隱身於外殼之下,卻承載著無人機安全、精確與智能的重任。理解 IMU 不僅是理解一項技術,更是理解如何在高風險的飛行任務中,透過對物理規則的極致利用,轉化為可預期的商業成果。
我們始終相信,最偉大的技術往往是那些讓你「感覺不到它存在」的技術。IMU 正是如此,它默默地對抗著每一陣亂流,只為了讓每一次飛行都能平安降落。
![]()