無人機英文怎麼說?UAV、Drone、UAS 一次搞懂!
Last Updated on 2026-04-13 by James Huang
前言:別再只會說「Drone」了!
在現代科技的新聞報導或旅遊紀錄中,「無人機」或「空拍機」的身影無所不在。當我們想用英文描述這些會飛的小機器時,大腦第一個浮現的單字通常是 “Drone”。
但你是否曾在閱讀國外技術手冊或政府法規時,看過 UAV、UAS 甚至是 RPA 這些令人困惑的縮寫?其實,這些詞彙在專業領域中各有其代表的含義。今天這篇文章將帶你從歷史由來出發,徹底釐清這些術語的差別,讓你從外行變內行,閱讀無人機資訊事半功倍!
「Drone」的由來:竟然跟「蜜蜂」有關?
大家最常用的「Drone」一詞,其原意其實是「雄蜂」。
這個稱呼要追溯到 1930 年代的第二次世界大戰。當時英國研發了一種名為 DH.82B Queen Bee(蜂王號) 的標靶飛機,主要用於訓練防空砲兵。由於這種飛機飛行時會發出持續且低沈的嗡嗡聲,聽起來就像蜜蜂一樣,加上它是「蜂王」的衍生機型,人們便開始以 Drone(雄蜂) 來戲稱這種無人駕駛的飛行器,這個親民的稱呼也就此流傳開來。
從「消耗品」到「消費品」的詞義演變從歷史角度看,Drone 最初被定義為「廉價且可消耗」的標靶。然而,隨著 2010 年後消費級無人機(如大疆 DJI、Parrot)的興起,這個詞發生了劇烈的「去軍事化」轉變。現代語境下的 Drone 已演變成一個涵蓋範圍極廣的通用術語,從台幣幾百元的玩具到數千萬美元的偵察機都被歸入此類。這種詞義的擴張雖然方便了大眾溝通,卻也造成了法律定義上的模糊,這也是為什麼專業機構更傾向於使用接下來要介紹的精確術語。
專業術語大解密:UAV、UAS、RPA 有什麼不同?
當我們進入學術研究、法律規範或商業合約時,為了精準定義,通常會使用以下專業縮寫:
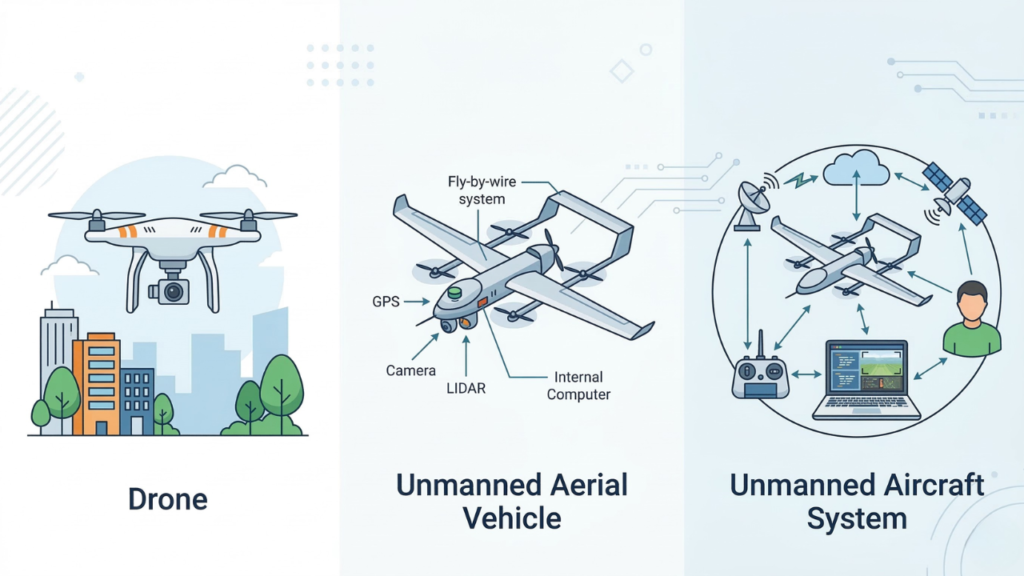
1. UAV (Unmanned Aerial Vehicle) — 無人飛行載具
這專指飛行器本體。重點在於「載具」本身不搭載飛行員。
2. UAS (Unmanned Aircraft System) — 無人飛行系統
強調的是一整套系統,包含飛行器、遙控器、數據鏈路(Data Link)及地面控制站(GCS)。
3. RPA (Remotely Piloted Aircraft) — 遙控駕駛飛機
強調「背後有人操控」,區別於全自動化或自主路徑飛行的機器。
法規監管與系統化思維的崛起國際民航組織(ICAO)與美國 FAA 轉向使用 UAS 而非 UAV,反映了產業思維的進化:無人機的安全性不只取決於飛機,更取決於「通訊鏈路」的穩定性與「地面操作員」的決策。若通訊中斷,即便載具(Vehicle)再先進也會失控。因此,在進行商業保險投保或申請特種飛行許可時,公文通常會要求描述整套「UAS」的架構。而 RPA 則是用於界定責任歸屬,確保在發生意外時,法律上能追溯到那名「遠端駕駛員」的責任。
機體結構:從旋翼數量來命名
如果你有在研究無人機,你可能會有聽過 “Multi-copter”(多旋翼)。這是根據螺旋槳的數量來做的稱呼,英文稱呼如下:
- Tri-copter:三旋翼
- Quad-copter:四旋翼(市場主流)
- Hexa-copter:六旋翼(提升載重)
- Octo-copter:八旋翼(高安全性)
冗餘機制與物理效能的權衡在多旋翼的世界裡,電機數量的增加不單是為了「力氣大」。Quad-copter 之所以成為主流,是因為它在結構簡單度與控制穩定性之間取得了完美的平衡。然而,在載運高昂攝影機(如 Alexa Mini)時,飛手會傾向選擇 Hexa 或 Octo。這背後的核心邏輯是「動力冗餘(Redundancy)」:四旋翼若有一個馬達失效,飛機將立即墜毀;但六旋翼或八旋翼在損失一個馬達的情況下,飛控系統(FC)通常能重新分配動力,實現緊急降落,這對於降低商業風險至關重要。
空拍技術與操作必懂詞彙
1. 影像與視覺技術
- AP (Aerial Photography):空拍。
- FPV (First Person View):第一人稱視角。
2. 定位與精度技術
- GNSS:全球衛星導航系統統稱。
- RTK (Real-time Kinematic):實時動態技術,達公分級精度。
- IMU (Inertial Measurement Unit):慣性測量單元。
從「看得見」到「測得準」的技術分水嶺早期的無人機技術重點在於 FPV 與影像回傳,目的是讓飛手「看得見」。但現代專業無人機的分水嶺在於 RTK。一般的 GPS 定位誤差約在 2-5 公尺,這在城市高樓巡檢或農噴作業中是不可接受的。RTK 技術透過地面基準站與衛星信號的載波相位修正,將精度提升至公分等級,這讓無人機從單純的「攝影工具」轉變為精準的「空間測量儀器」,直接驅動了智慧農業與數位孿生(Digital Twin)產業的發展。
總結:讓技術語言成為你的飛行翅膀
掌握正確的無人機術語,不僅僅是記憶幾個縮寫,更是建立專業認知的基石。透過這篇文章,我們了解了無人機如何從早期簡陋的戰場標靶,一步步進化為現代整合了衛星導航、慣性測量與複雜系統架構的科技載體。這段演進史反映了人類對天空掌控權的提升,也讓「飛行」不再是飛行員的專利。
在科技快速更新的今天,掌握精確的術語能幫助你跨越語言障礙,直接與全球最前沿的資訊接軌。當你能自如地運用這些詞彙時,你已經從一名業餘愛好者成長為具備系統思維的專業人員。正確的術語不僅能確保溝通的精準度,更能在專業社群中展現出無可取代的深度與高度,成為你在廣闊天空中導航、切入核心資訊的最佳工具。
希望你喜歡這篇深度分析,
在這個技術與地緣政治高度交織的時代,無人機早已不只是工具,而是一股正在重塑產業與世界秩序的關鍵力量。每一次看似微小的技術演進背後,都可能蘊藏巨大的商業機會。
我是 James,從無人機新創的視角出發,帶你突圍低空經濟,拆解無人機與科技巨頭背後的商業邏輯。我們下篇文章再見!
如果你想掌握全球無人機產業動態與科技趨勢,歡迎訂閱 《無人機男孩》電子報。每週一期,我將從海量資訊中篩選出最值得關注的內容,讓你不只是接收資訊,而是真正看懂機會。
目前已有超過 1,000 名訂戶,重點是 免費!歡迎透過下方表單訂閱加入我們,一起掌握低空經濟新機會。
![]()








我對無人機一竅不通,看完版主的文章,也對無人機有了興趣。感謝版主分享,希望版主會介紹更多關於無人機的資訊~
謝謝你嘿,希望對你有幫助,我會努力產出新文章的
謝謝你嘿,希望對你有幫助
四旋翼占大多數,八旋翼比較偏向特定領域專用
謝謝你,希望可以幫助到大家
謝謝你,希望可以幫助到大家
謝謝您,歡迎多多關注呦