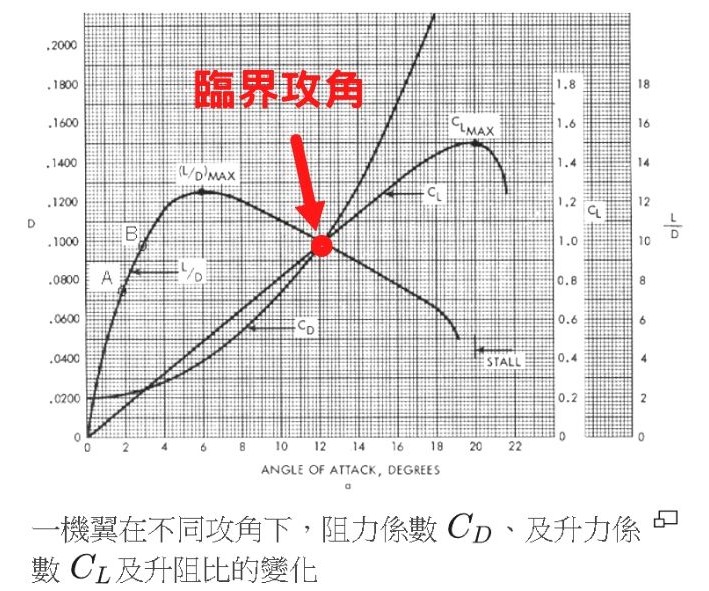
【無人機考照】學科測驗重點整理懶人包-基礎飛行原理篇





如果我的文章對你有幫助,歡迎贊助我一杯咖啡!










空拍機看起來好專業,居然還需要考證照!
身邊的朋友失戀分手了也拜了一台來玩,空拍機的魅力真的擋不住!
謝謝站長這麼專業的分享!
謝謝您,喜歡的話可以訂閱我呦
謝謝您,喜歡的話可以訂閱我呦
謝謝您,喜歡的話可以訂閱我呦
都可以去考呦,沒有限定,但是一定要充分練習歐,術科很有難度
抽空看一下飛行理論篇,很棒,